
SenseGlove
The Role of Force and Vibrotactile Feedback in Learning and Retaining Procedural and Factual Knowledge
In Brief
SenseGlove is a Dutch startup specialising in virtual and augmented reality interactions. During my research thesis internship as a Human-Computer Interaction Researcher, I investigated how the force and vibrotactile feedback of SenseGlove Nova haptic gloves can enhance learning in a virtual fire safety training simulation. Thanks to this combination, students can repeatedly train, enhancing both knowledge recall and muscle memory.
Role
TL;DR
Study at a Glance
This study examines the impact of haptic feedback on procedural and factual knowledge retention in VR training, specifically using the Cognitive Affective Model of Immersive Learning (CAMIL).
DISCOVER: I analysed issues in VR training and haptic feedback to understand learning gaps, reviewing research on using them separately or combined.
DEFINE: I selected the Cognitive Affective Model of Immersive Learning as a framework and adapted it to test how VR and haptic feedback could boost key learning outcomes.
RESEARCH DESIGN: I crafted an experimental setup and identified necessary tools and participant groups to capture data on VR and haptic experiences.
TESTING: Two participant groups (one with haptic feedback and one without) completed a VR fire safety simulation to assess their knowledge retention.
RESULTS: The findings showed that haptic feedback improved embodiment and procedural knowledge retention. Participants in the haptic feedback (HF) group reported a higher sense of embodiment (M = 3.93, SD = .47) compared to those in the no haptic feedback (NHF) group (M = 3.30, SD = .62). At the same time, presence and motivation correlated positively with retention over time.
LIMITATIONS & FUTURE RESEARCH: I finally addressed study constraints and suggested areas for further investigation.
DISCOVER
Enhancing VR Learning: The Missing Role of Haptic Feedback
Problem
Technology advances in teaching, including digital videos, eye-tracking, and simulations, have improved learning outcomes through virtual environments.
Nevertheless, VR training simulations have limitations, precisely the absence of haptic feedback, which has shown inconsistent results in enhancing learning outcomes.
My literature review revealed the following gaps:
1
60% of 40 studies neglect the overall role of haptic feedback on learning outcomes.
2
25% of 20 reviewed studies examine the cognitive effects of haptic feedback, such as memory retention.
3
50% of 30 studies failed to consider user experience factors like motivation, embodiment, and self-efficacy.
4
45% of 25 studies rely on qualitative methods or anecdotal evidence (insufficient empirical data).
5
35% of 20 studies explore the integration of haptic feedback with other immersive technologies.
These gaps highlight the need for improved procedural and factual knowledge retention, which are key outcomes in effective VR training environments.
The Core of the Research Project
Research focus
Building on these insights, my study investigates whether force and vibrotactile feedback in Virtual Reality (VR) can enhance and retain different learning outcomes.

But before doing that...
I had to investigate and understand how haptic feedback and VR could affect learning outcomes and what method would best enhance them.
Understanding Different Types of Learning
Chapter #1
I found that immersive virtual reality training has recently occurred as a remarkable supplement method for increasing two types of knowledge acquisition:
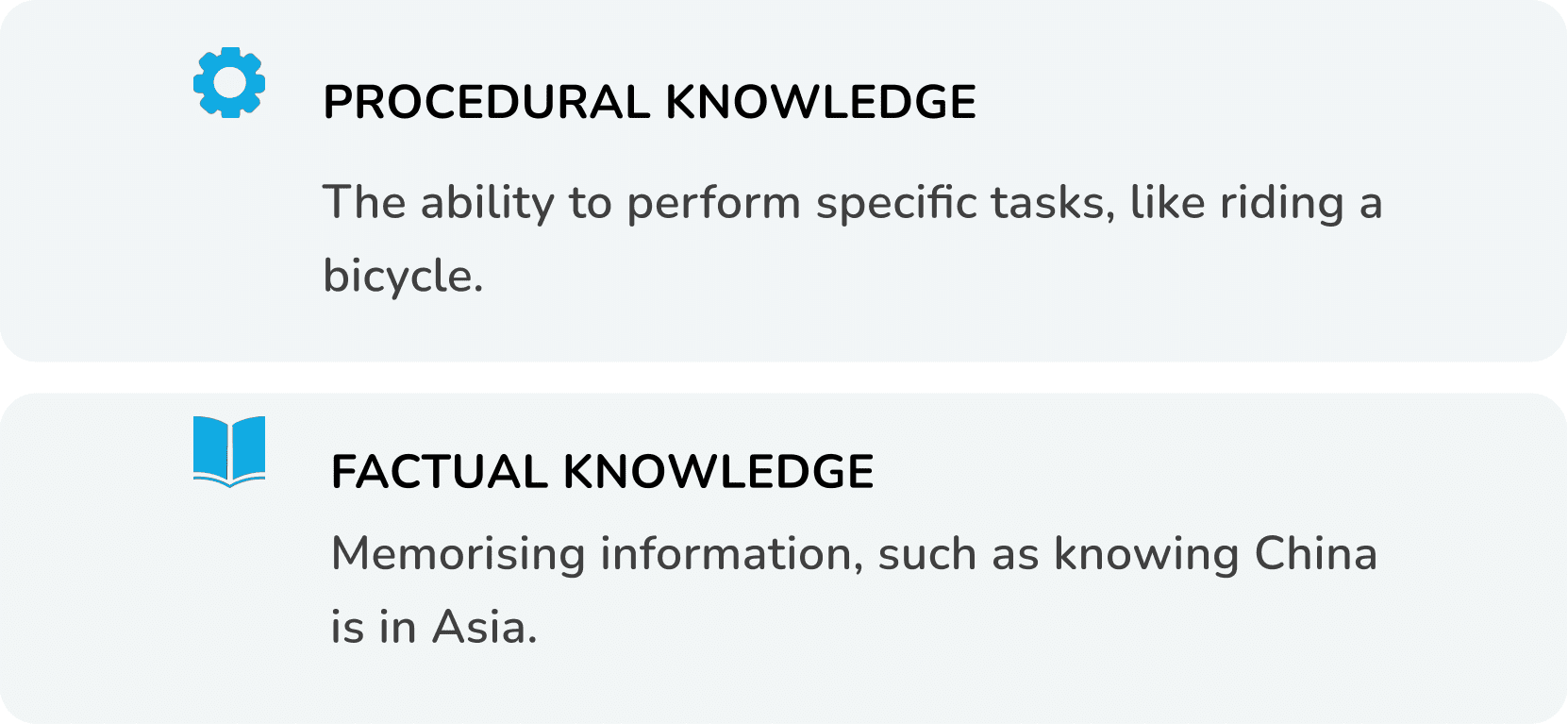
Learning styles, which shape how individuals absorb information, are crucial in VR training simulations.
Kinaesthetic learning, emphasizing physical experiences, aligns with Embodied Cognition theory, highlighting interaction with the environment to enhance learning and retention.

Current simulations lack sufficient kinesthetic feedback, but haptic feedback provides a practical solution, enhancing learning through deeper physical interaction and engagement.
Feel the Virtual Reality as if It is Real
Chapter #2
I then started exploring into haptic feedback and hands-on experience in VR, aiming to find their benefits in a virtual training simulation.
Haptic Feedback:
The term refers to simulating the human sense of touch by a VR interface. There are two classes of haptic feedback for VR training simulations:
Kinaesthetic Feedback
It simulates virtual objects' solidity, weight, and momentum by applying forces to the body.
Example: force feedback.
Tactile Feedback
It simulates textures, temperatures, and vibrations using small actuators.
Example: vibrotactile feedback.
To address the lack of haptic feedback in VR training, I used SenseGlove Nova, a haptic glove that simulates touch, size, and stiffness to enhance interaction and knowledge acquisition.
SenseGlove Nova, The New Sense in VR
SenseGlove Nova has been primarily designed to help train technical professionals, such as aircraft mechanics and assembly line workers. Its interface delivers both force and vibrotactile feedback.

How SenseGlove Nova Works



How to Improve Learning in VR: The CAMIL Model
Chapter #3
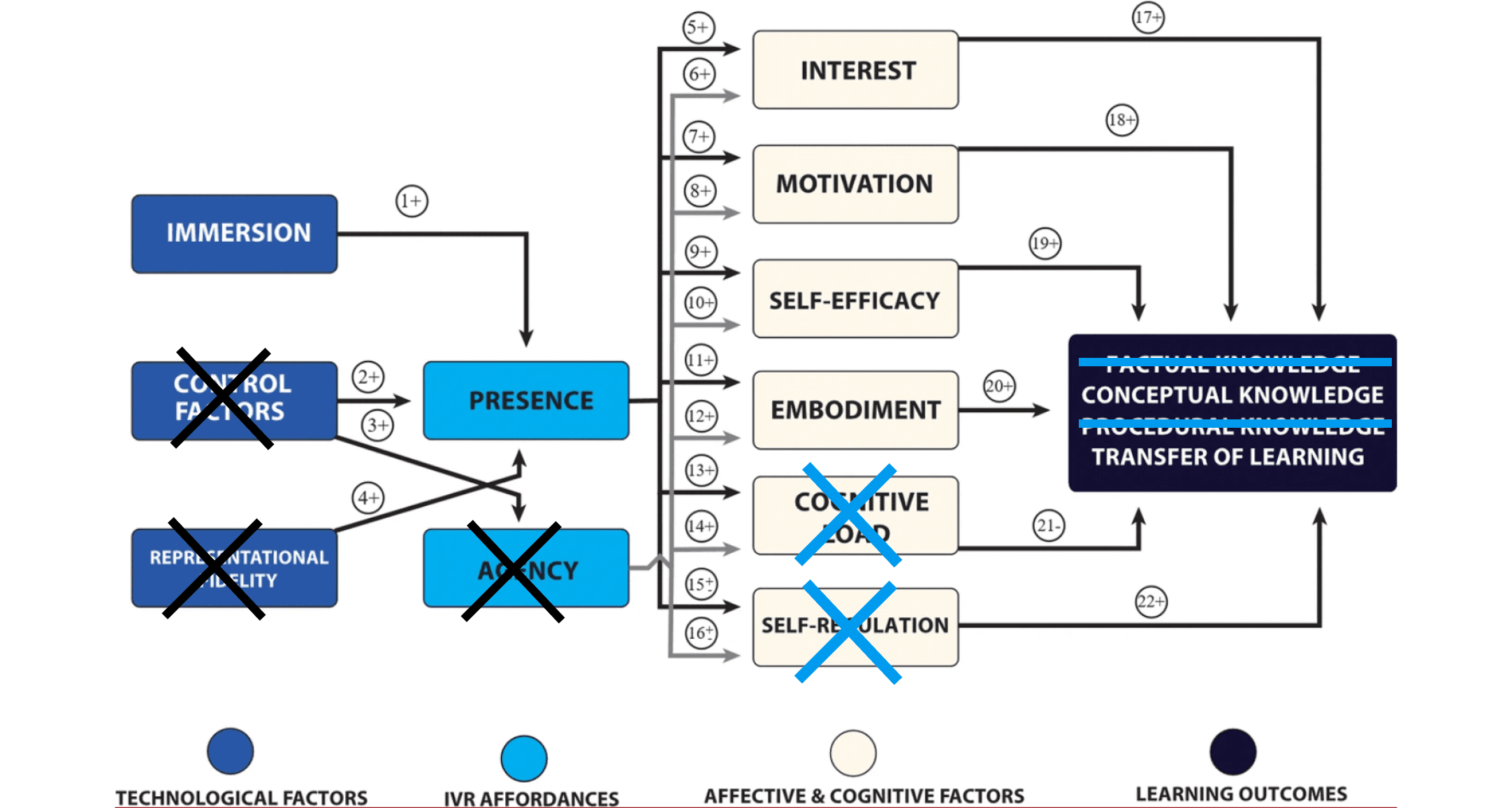
To understand how immersive VR environments and haptic feedback affect learning, I applied the Cognitive Affective Model of Immersive Learning (CAMIL) by Makransky and Petersen (2021).
The model outlines six key factors—interest, motivation, self-efficacy, embodiment, cognitive load, and self-regulation—that influence knowledge acquisition, providing a framework to assess how SenseGlove Nova can enhance learning outcomes.

Makransky, G., & Petersen, G. (2021). The Cognitive Affective Model of Immersive Learning (CAMIL): A Theoretical Research-Based Model of Learning in Immersive Virtual Reality. Educational Psychology Review, 33(3), 1-2. https://doi.org/10.1007/s10648-020-09586-2
DEFINE
Focusing on What Matters Most
For the sake of this study, however, I had to make some changes.
1
The study focused on how immersion and interaction, enhanced by haptic feedback, impact learning outcomes, excluding control factors and representational fidelity as they were beyond its scope.
2
The study also did not consider the sense of agency since it focused on presence and physical interaction through haptic feedback.
3
Finally, the research focused on four factors associated with haptic feedback: interest, motivation, embodiment, and self-efficacy.
The Edited CAMIL Model
Definitions' summary of presence and immersion and the four factors:
Research Question and Hypothesis
This study, guided by the CAMIL model and SenseGlove Nova, examines haptic feedback’s role in virtual fire safety training and its long-term impact on learning outcomes.
RESEARCH QUESTION
“ Does the implementation of force and vibrotactile feedback in a virtual training environment (VTE) lead to enhanced procedural and factual knowledge acquisition after one week, compared to a VTE without haptic feedback? ”
HYPOTHESIS
" Implementing force and vibrotactile feedback in a virtual training environment (VTE) enhances procedural and factual knowledge acquisition after one week, compared to a VTE without haptic feedback. "
In line with the CAMIL model, the current research sought the correlations between:
1
Haptic feedback and sense of presence.
2
Haptic feedback and the four factors mentioned before.
3
Haptic feedback and procedural and factual knowledge.
RESEARCH DESIGN
My Methodology
I designed a between-subjects study to assess haptic feedback’s impact on knowledge retention, avoiding sequential conditions that might affect learning differences.
This approach helped measure haptic feedback’s effect on learning while minimising confounding variables.
Overview of The Experiment Procedure

TESTING
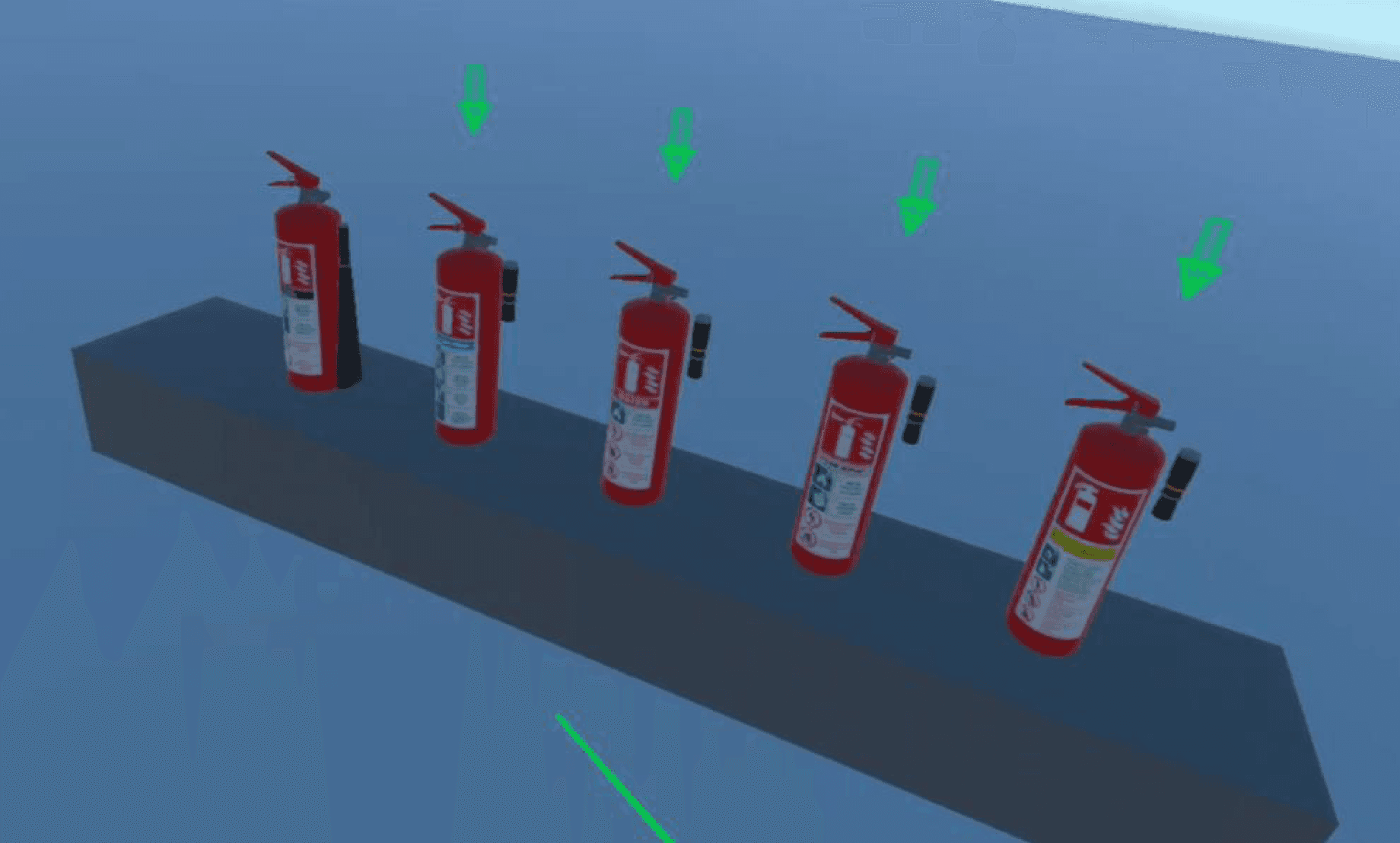
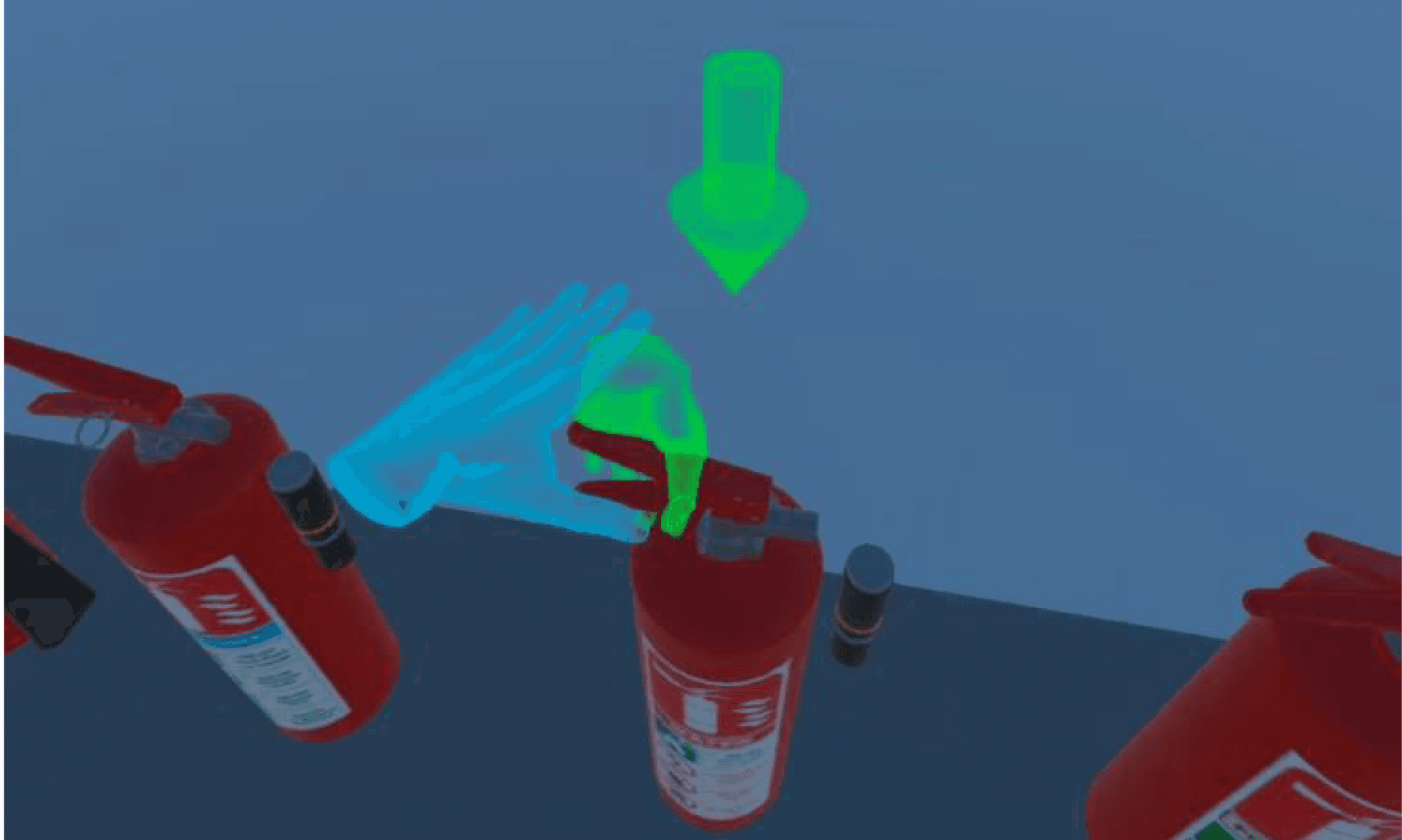
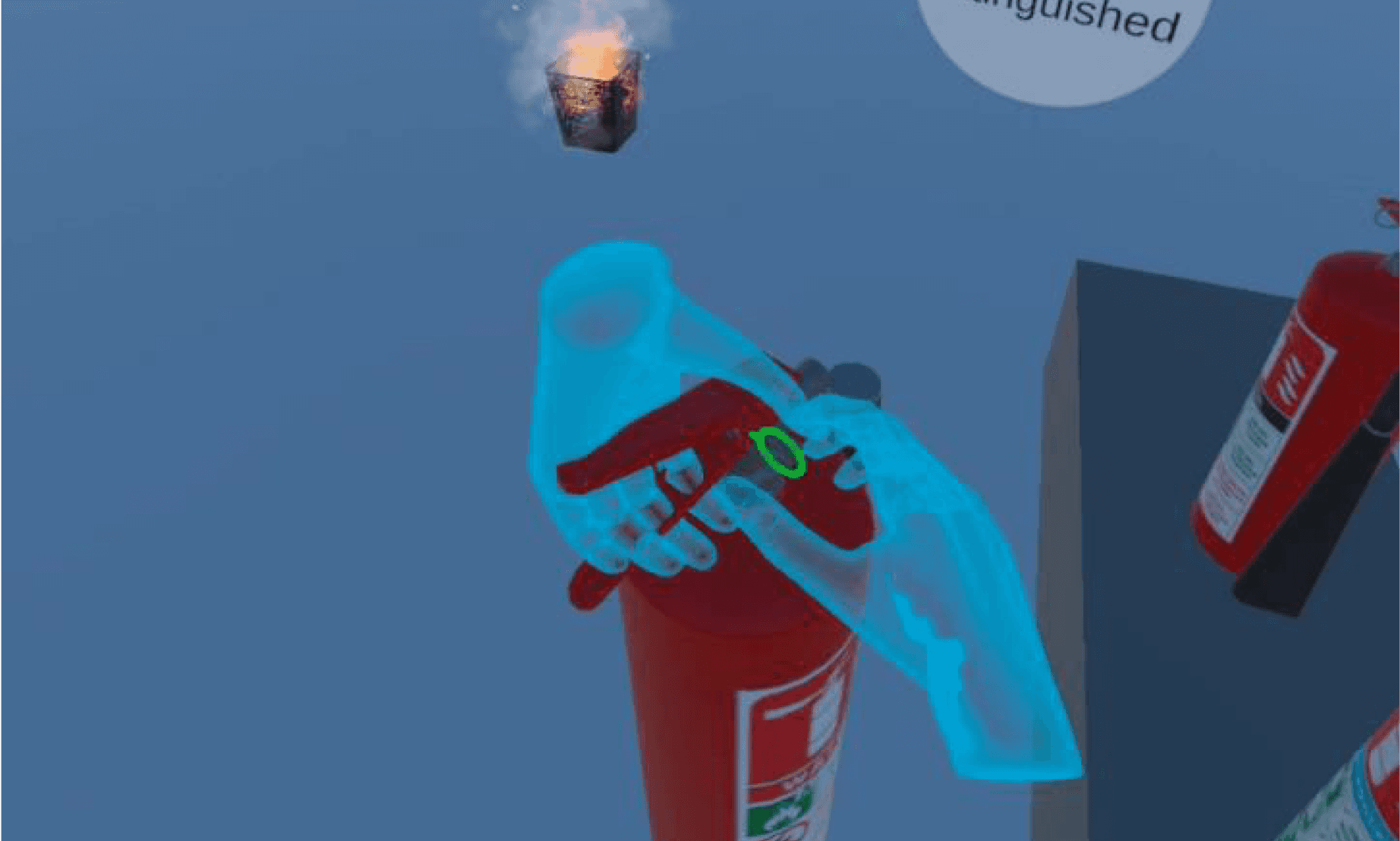
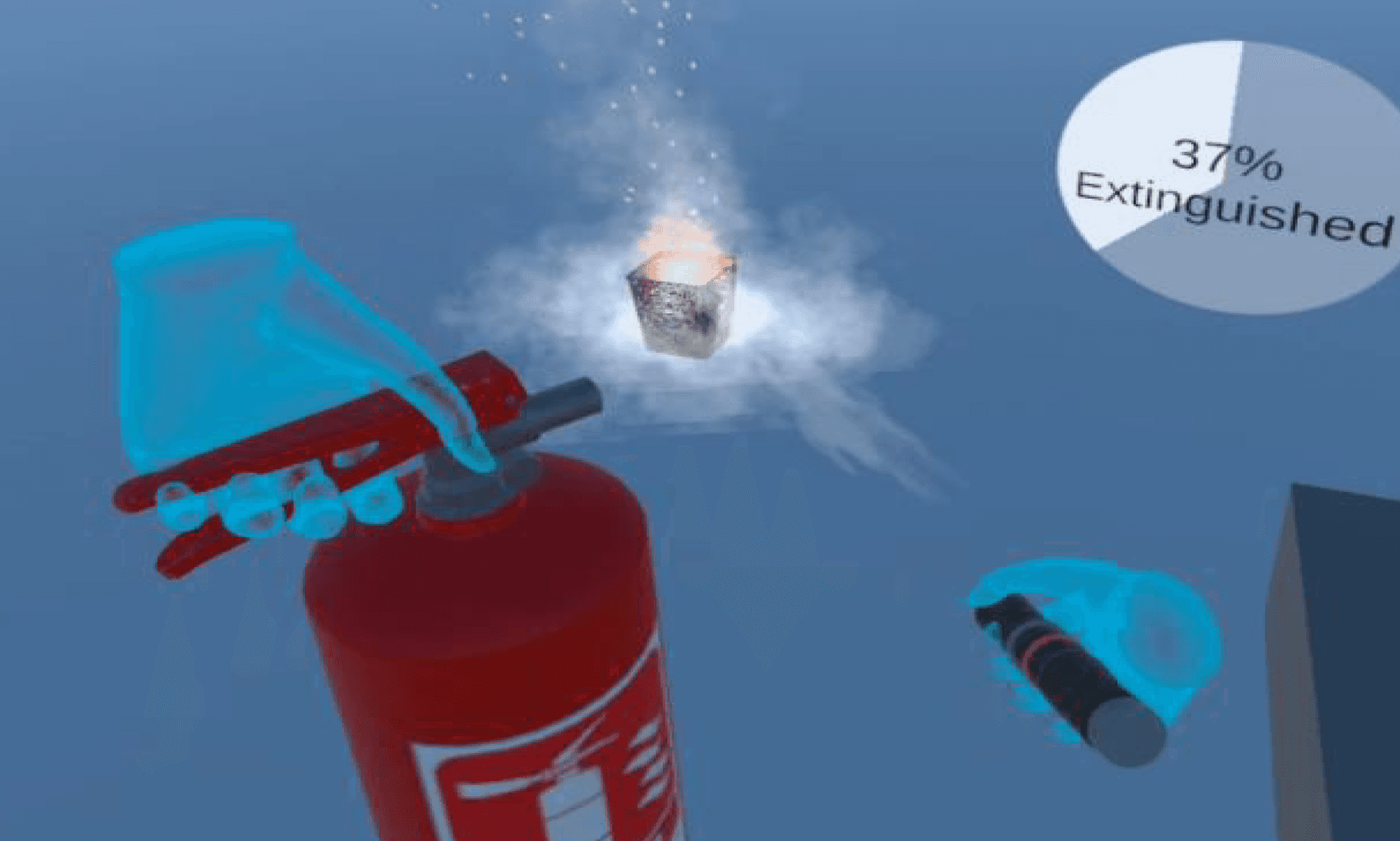
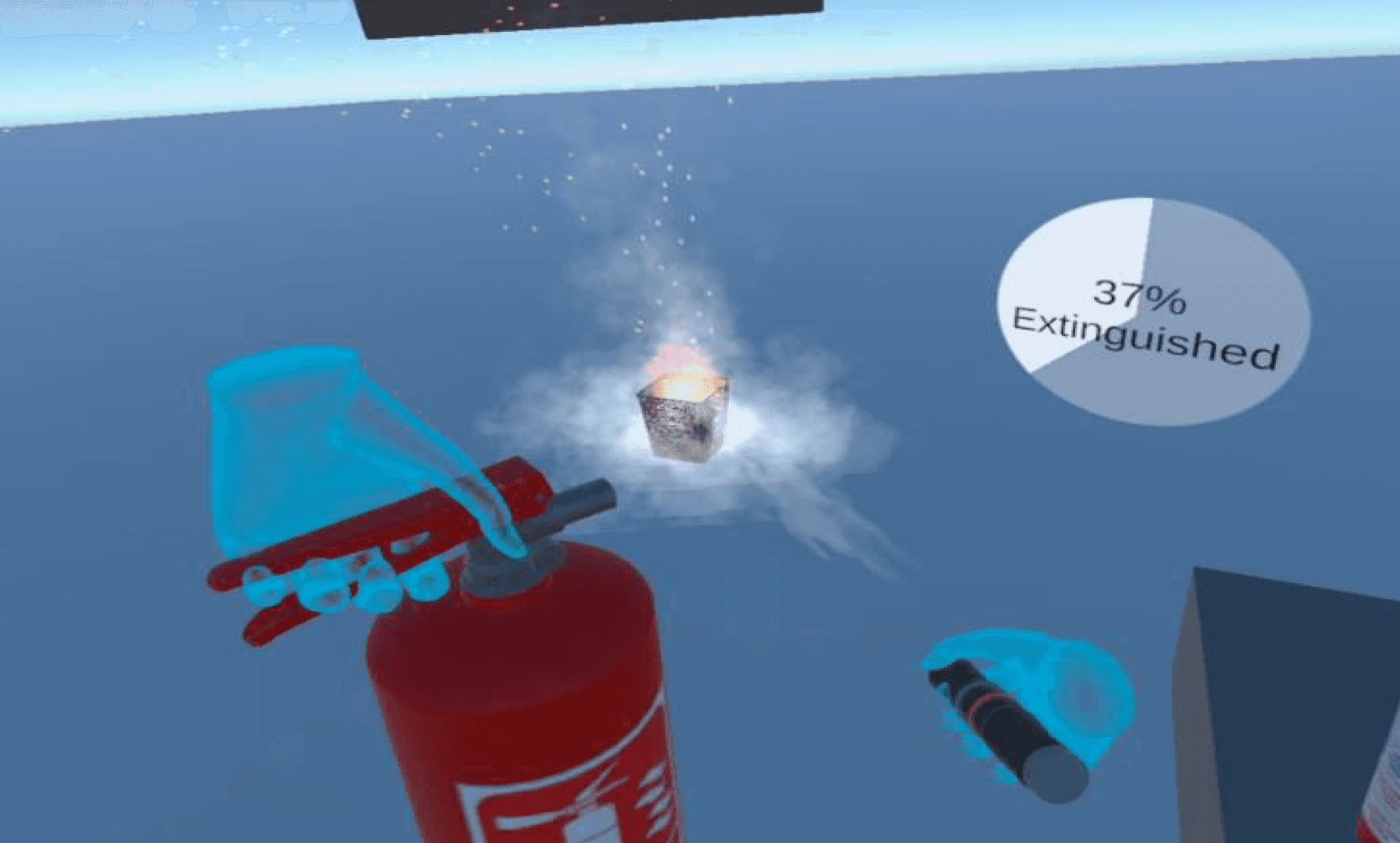
The Virtual Fire Training Simulation
How to use a fire extinguisher:

Main Menu

The Main Menu is where users can select the training:
Basic Fire Training runs the user through a whole training scenario of all classes of Fire.
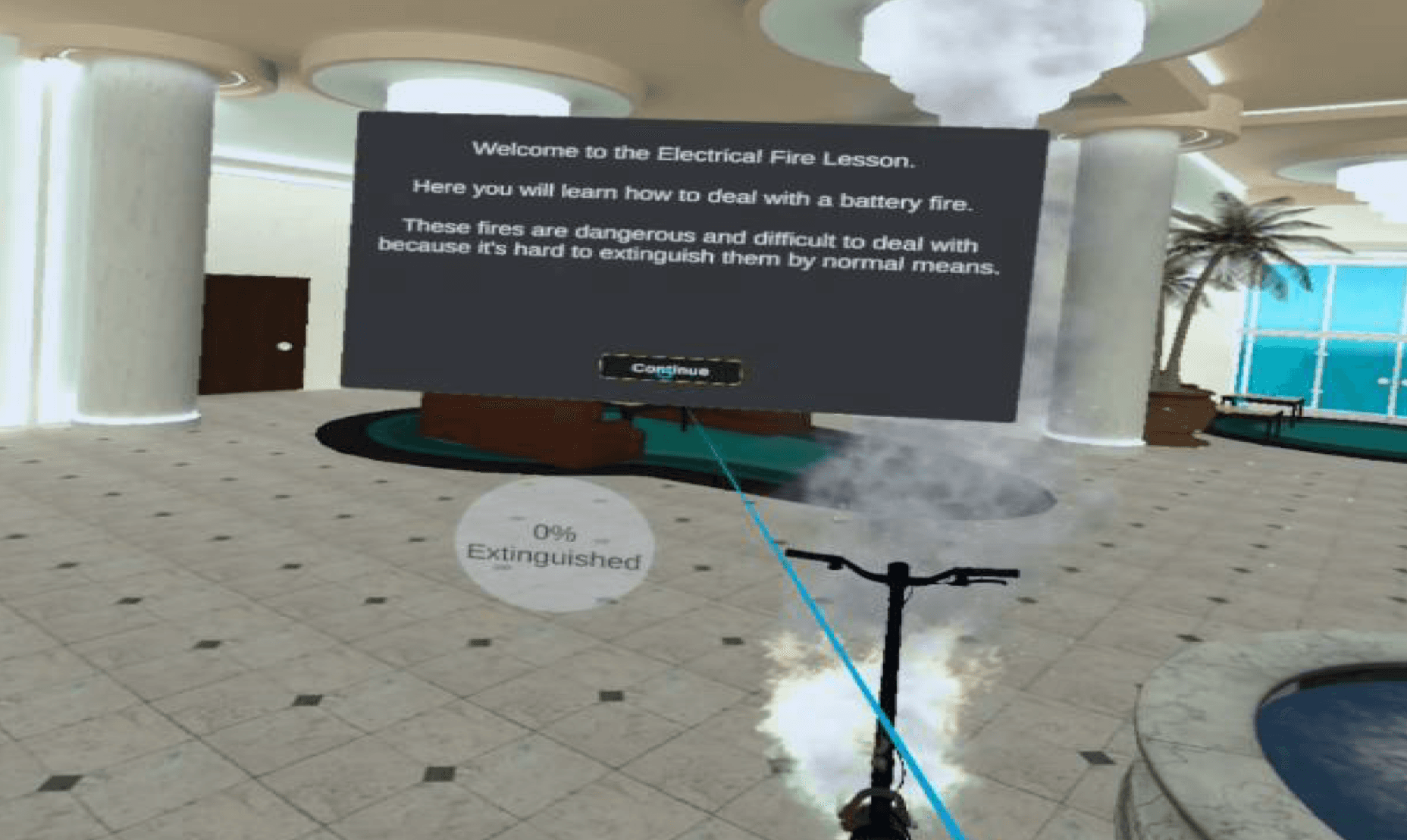
Electrical Fire: the user deals with an electrical fire in a hotel lobby.
Oil Fire: the participant deals with a fire in a deep fryer in a kitchen.
Regular Fire: the user deals with a small fire inside a hotel room.




RESULTS
Key Figures and Insights
Here is a summary of the most relevant results we found from testing the VR safety training simulation.
1
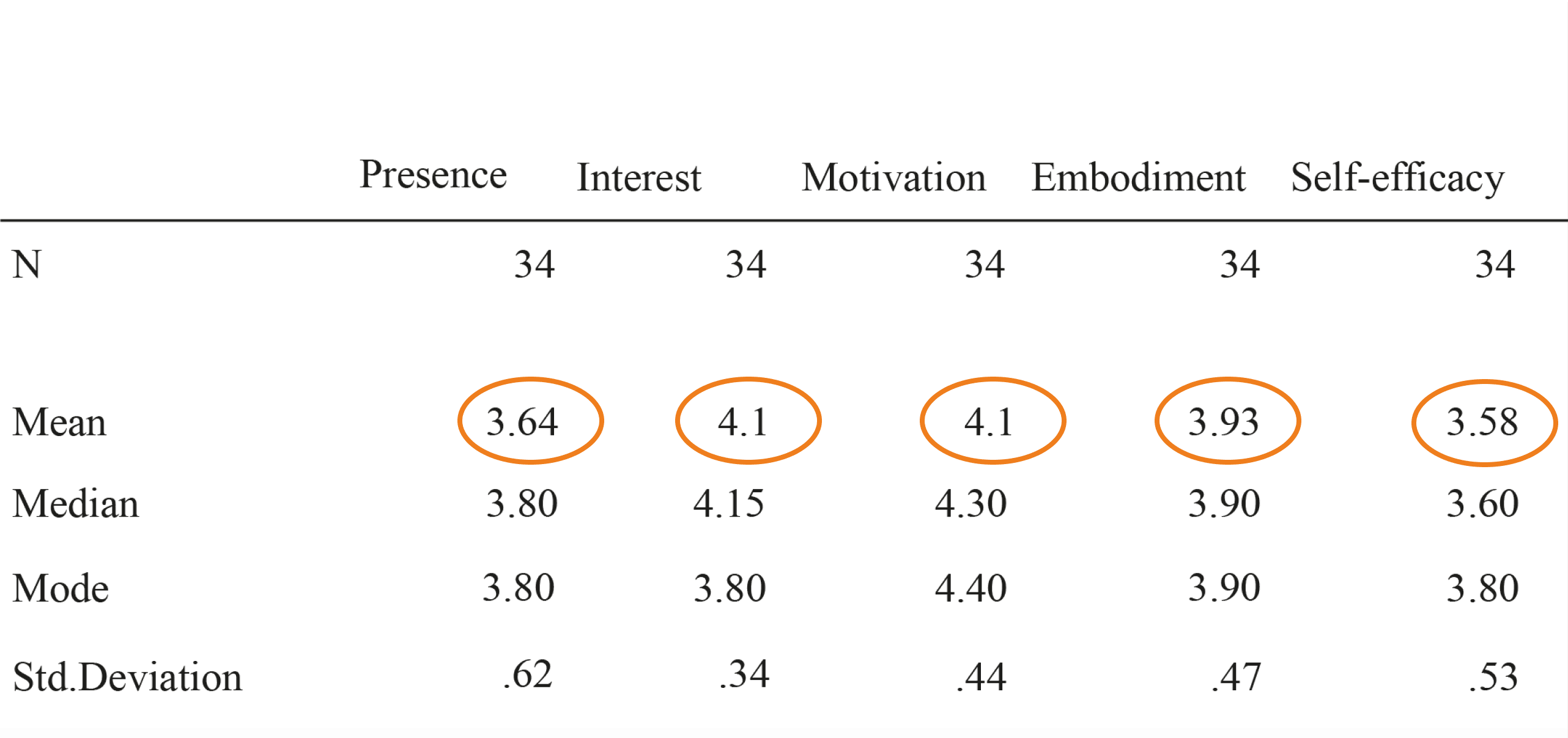
Descriptive Statistics of Presence and the Four Factors
EXPERIMENTAL GROUP HAPTIC FEEDBACK (HF)

CONTROL GROUP NO HAPTIC FEEDBACK (NHF)
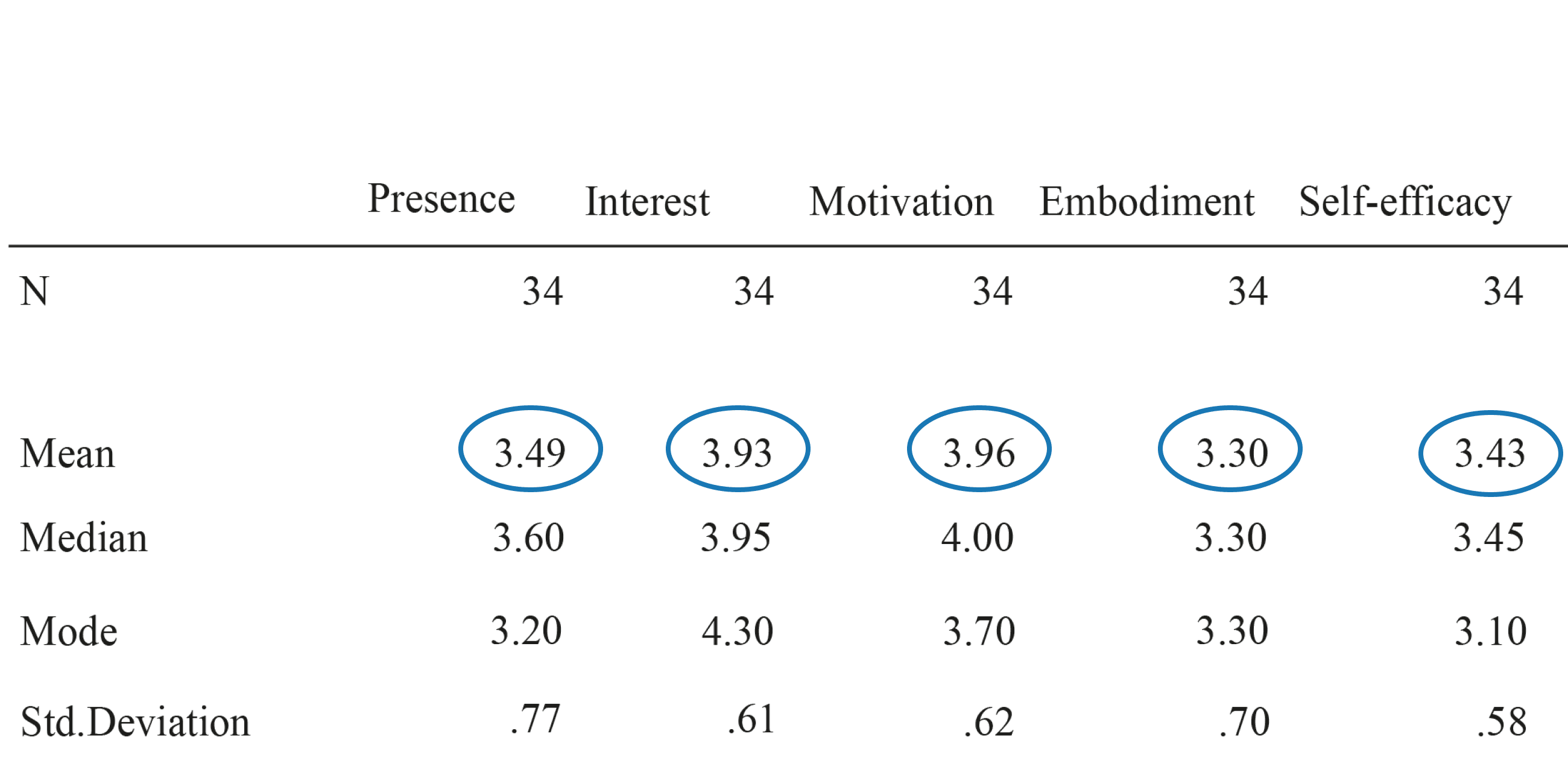
The haptic Feedback (HF) group showed higher mean presence, interest, motivation, embodiment, and self-efficacy scores.
On the contrary, the group's lower standard deviation in presence, interest, and motivation suggests haptic feedback fosters a more consistent experience..
2
Mann Whitney U (significat findings):
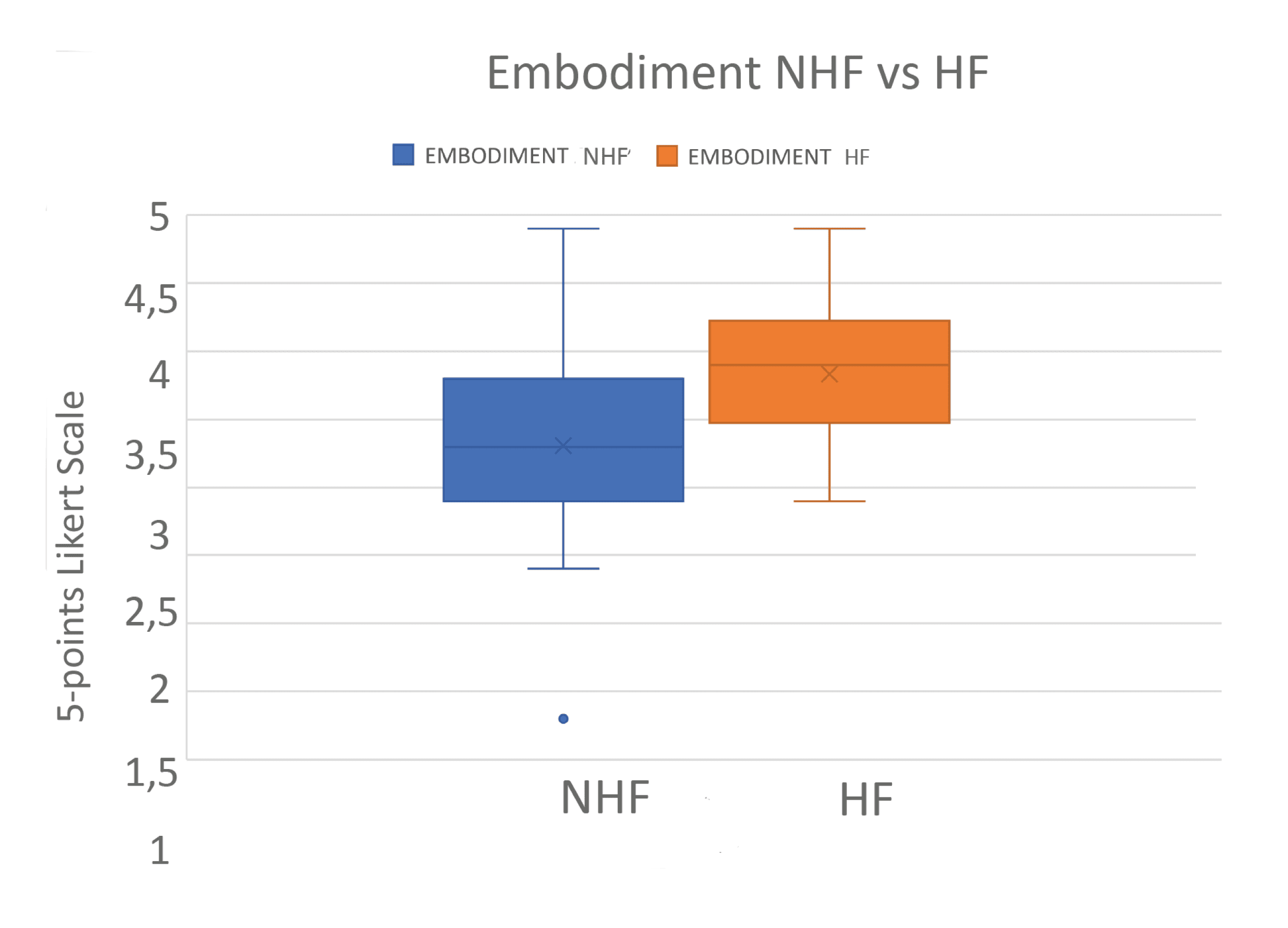
Force and vibrotactile feedback effectively increase embodiment in a virtual training environment.
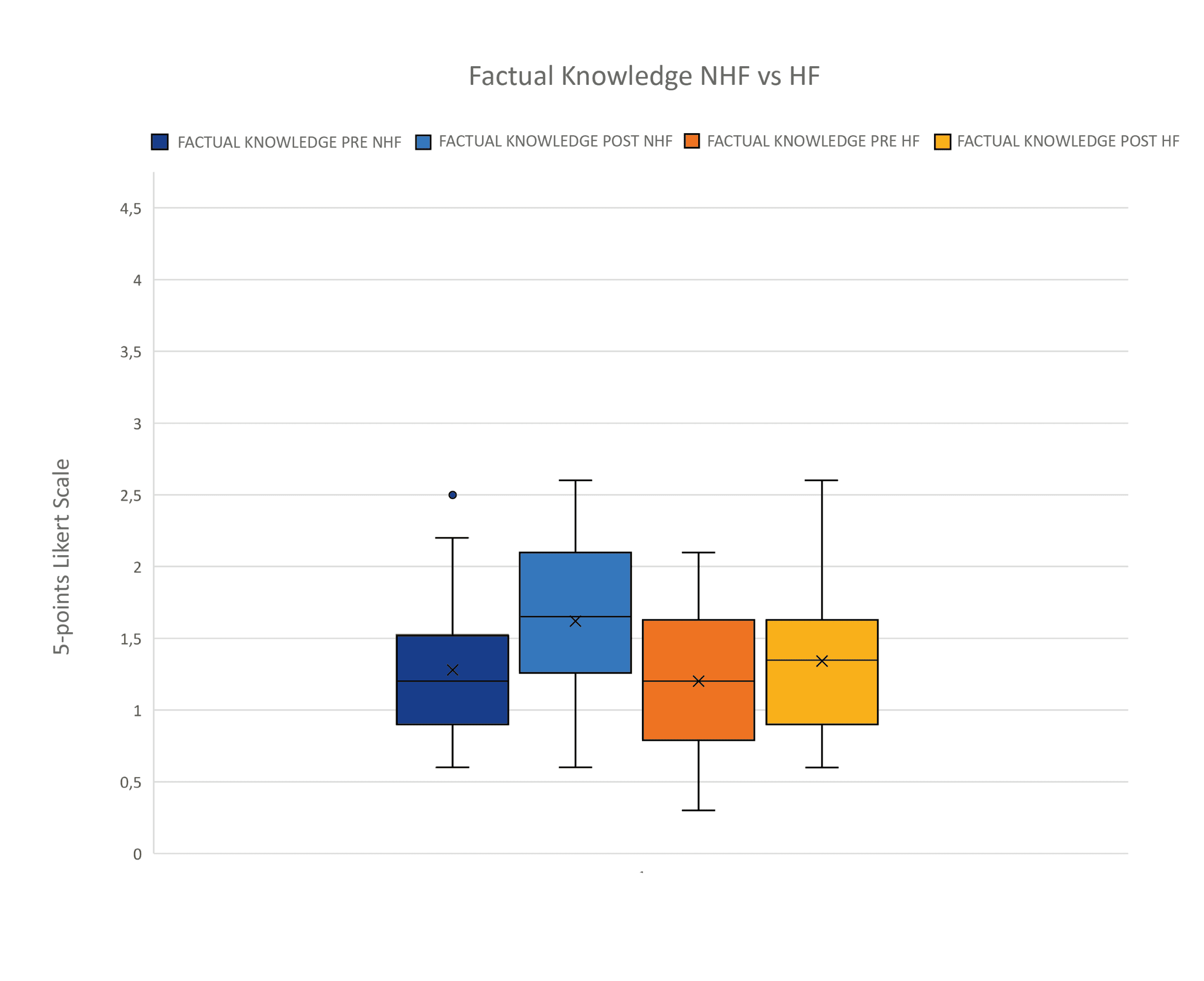
We found no significant difference between haptic feedback and no haptics. regarding procedural and factual knowledge
Why is there a lack of significant differences between HF and NHF groups?
If the training was simple, both groups may have learned the same amount of new procedural knowledge.
Participants may have used similar learning strategies, while haptics could have increased cognitive load instead of aiding them.
3
Wilcoxon Signed-Rank Test
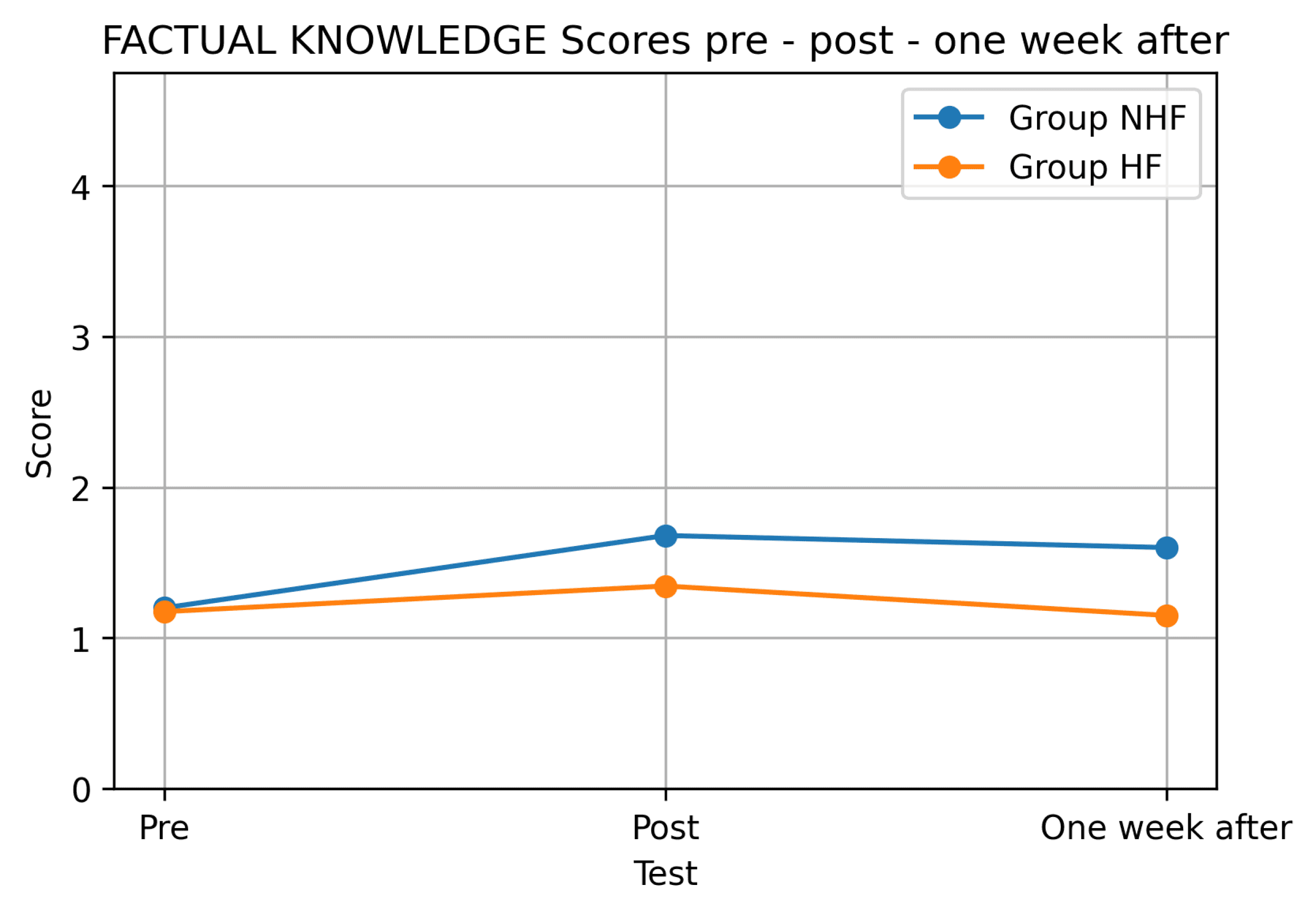

OVERALL INCREASE (ONE WEEK-PRE) p = .004
OVERALL INCREASE (ONE WEEK-PRE) p = .507
The increase was the same from before the training to one week after retention (in the haptic condition).
Why is there a lack of significant differences between HF and NHF groups?
One reason might be that memory retention can differ widely among individuals.
A second reason might be that the increased cognitive load may have prevented participants from retaining information long enough.
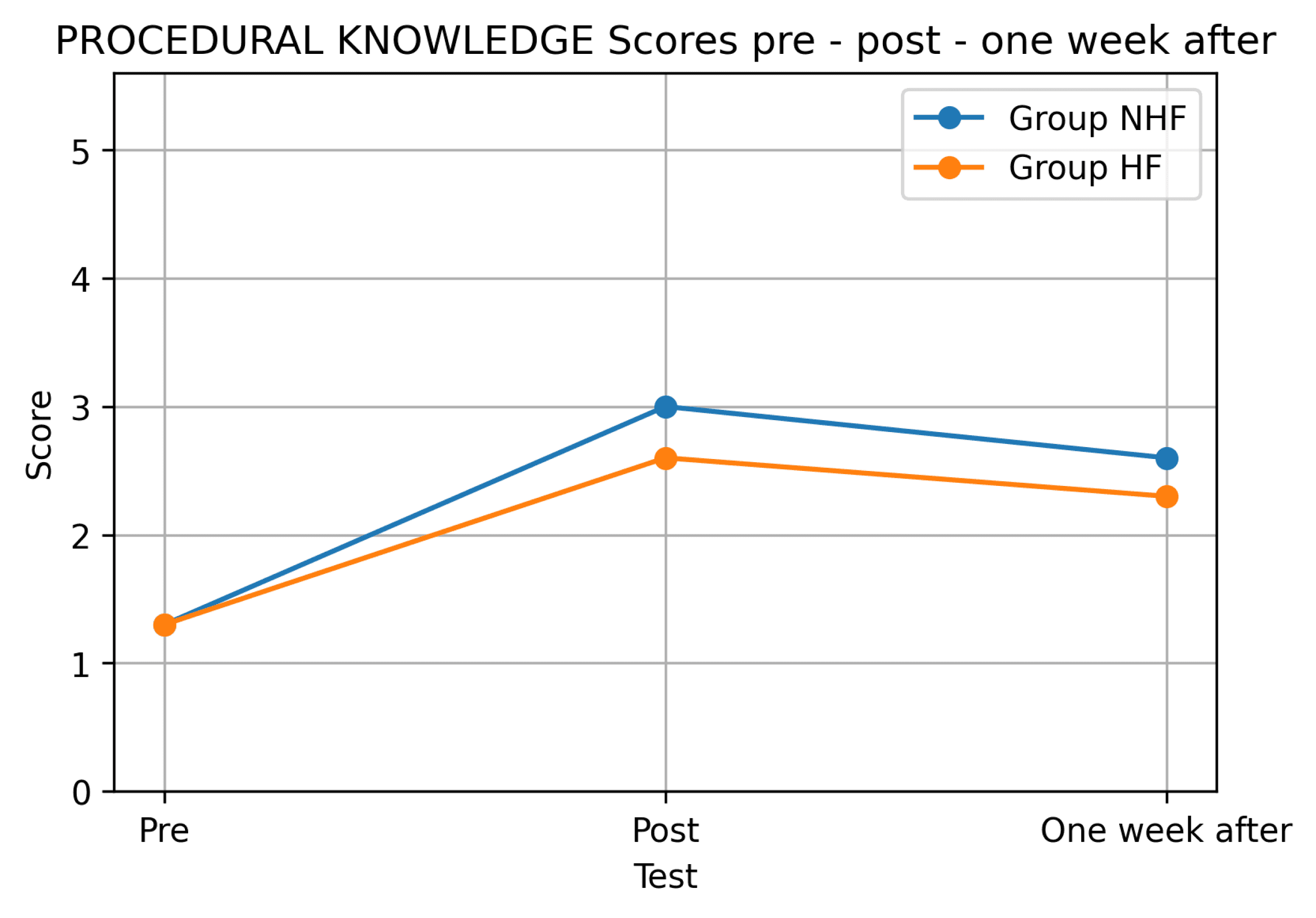

OVERALL INCREASE (ONE WEEK-PRE) p = .001
OVERALL INCREASE (ONE WEEK-PRE) p = .001
Both groups showed a significant knowledge increase from pre- to post-training.
One week after, the post-HF group showed less decay than the post-NHF group, though the difference wasn’t significant.
Why is there a lack of significant differences between HF and NHF groups?
Similar prior knowledge levels may have led to comparable improvements in both groups.
Moreover, both groups might have used similar learning strategies during the training.
4
Spearman’s Rank-Order Correlation
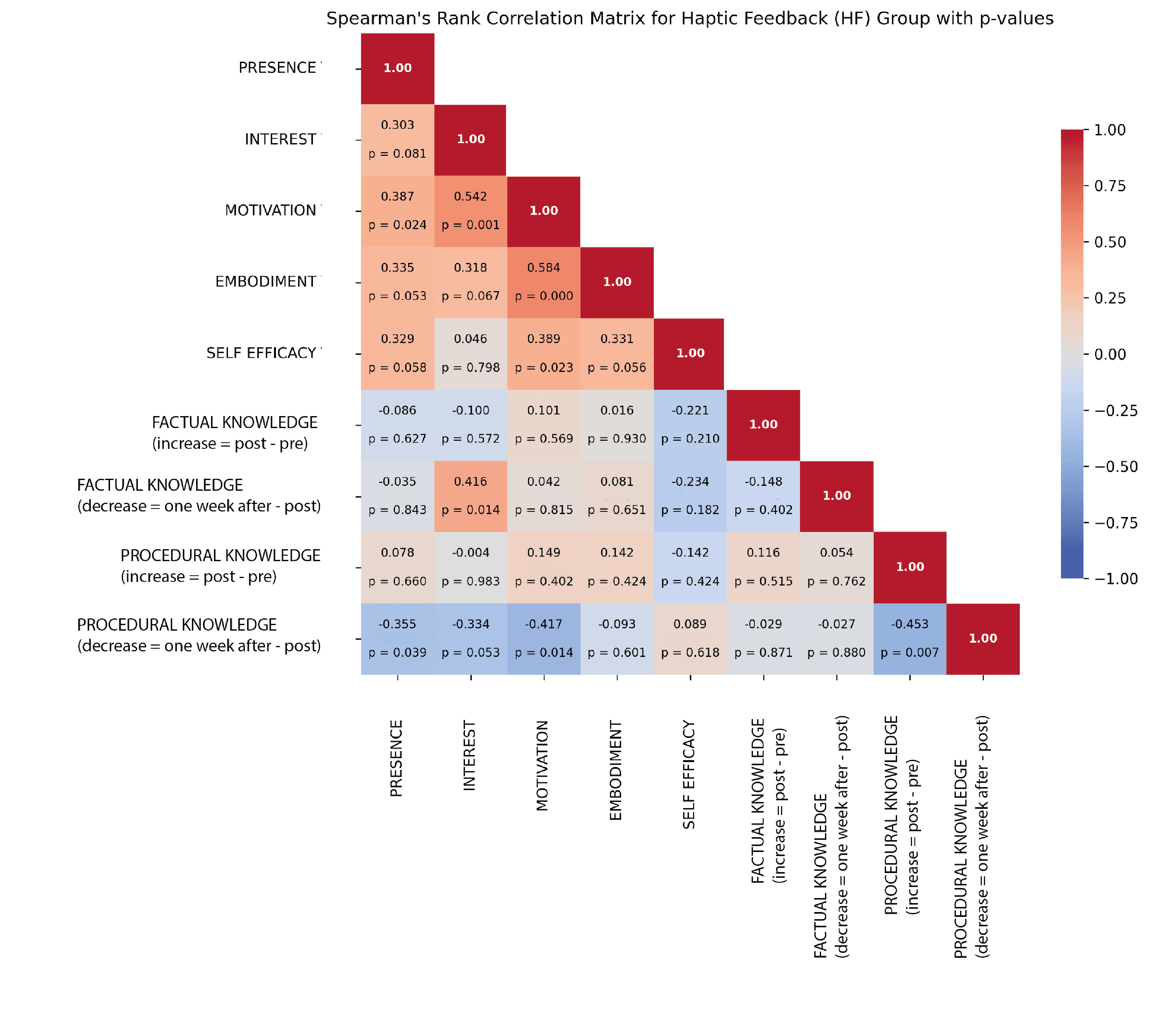
A significant negative correlation between presence and procedural knowledge retention suggests that more significant presence reduces knowledge decay.
Similarly, higher motivation was linked to reduced procedural knowledge decay.
Insights: What I Found
1
Force and vibrotactile feedback in virtual training can enhance people's sense of embodiment.
2
Haptic feedback in VR boosts presence, positively affecting motivation and improving procedural knowledge retention.
3
With ongoing research and improvement, haptic feedback will be a valuable tool for enhancing procedural knowledge in virtual training.
LIMITATIONS

Problem Within the Simulation
20% of people in the haptic feedback (HF) group experienced their virtual hands floating away from them.
Sample Size
A larger sample size is needed to increase the probability of detecting smaller effects, generali sability, and more robust exploratory analyses.
Test and Assessment
This study only conducted quantitative research. Therefore, a qualitative study using interviews or open-ended surveys would benefit the present research.

Repeatability in the Training
It was impossible to repeat the training simulation over time. This lack of repeatability decreased the success of learning and retaining more information.
FUTURE RESEARCH
What’s Next?
Future research should focus on longitudinal studies, as participants will likely show improved performance and retention over time.
Tracking the learning curve is crucial to identify key moments when participants’ knowledge and cognitive responses shift, helping us understand learning progression.
REFLECTION
Shaping the Future of VR Training
My research showed that haptic feedback boosts embodiment, demonstrating how SenseGlove's technology fosters immersive training. It also significantly improves procedural knowledge retention, especially for muscle memory tasks.
Reflecting on my time at SenseGlove, I feel blessed by the hands-on experience with cutting-edge technology and the supportive team that inspired me. I'm excited to see this technology increasingly place people at the centre of impactful learning experiences, and I can't wait to see its magic unfold in the future!